 Robotics Robotics |
| "Realizing dreams!" |
|
|
|
>Hello, I'm EDI!
|
|
There are a lot of thing a normal human beings can not do or sometimes one alone is not enougth. This could be a long travel (space), automatic and tedious routines (montage or guardian) or perhaps help in reaction to critical situations (diseases). Our technologies are flexible and according to the situations and specifications can be scaled and potentiated.
|
|
|
Research on: Robotics and AI
Version 18B-A
Version 17A-D
Size: 1.60-1.80 m
Weight: 10-20 Kg
|
|
|
|
Status: On going
|
|
|
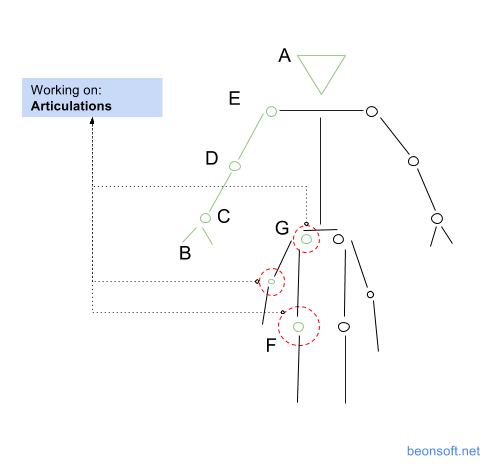
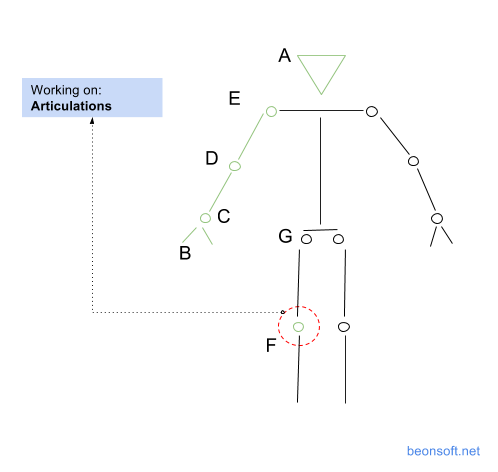
E Phase: Shoulder
|

|
|
Continuing the development of a human sized arm, we achieved a robust and flexible 360° spheric movement. It uses a stronger motor to move objects and the arm itself (the prototype force is 1.5 Kg).
|
|
|
D Phase: Arm
|

|
|
This is a human-like extension to optimize weight und distance of objects. We decided to use a normal arm-dimension but it could be shorter or longer according to the requirements. It allows more flexibility by moves.
|
|
|
C Phase: Wrist
|

|
|
With this prototype you can rotate elements like the V-Hand under. We designed the forearm with human dimensions. All the components are alluminium and metal (plastic can be ordered). The rotating-power with the experimental motor is 500 gr.
|
|
|
B Phase: Hand
|

|
|
This prototype is a raw example of a V-Hand. It use a small industrial motor to close the hand elements. All the components are alluminium and metal (plastic can be ordered). In this prototype only the motor weighs 130 gr and the whole hand 250 gr. The press-power is 500 gr.
|
|
|
A Phase: Head
|

|
|
This prototype is an example of a central processing unit. We use an Android smartphone (no matter which) in which a developed internet controlled service control via Bluetooh the built components. On this way we dispose of all the software (connectivity and libraries) and hardware (camera and sensors) features at a measurable cost, flexibility mode and standard (and therefore replaceable) way.
|
|